Угловая скорость вращения ротора
К динамическим характеристикам (параметрам) гироскопа относятся:
1. Угловая скорость вращения ротора.
2. Момент инерции ротора.
3. Кинетический момент.
Рассмотрим последовательно каждую из перечисленных динамических характеристик гироскопа.
1. Угловая скорость вращения ротора.
Вращение любого твердого тела характеризуется тремя элементами:
– положением оси, вокруг которой происходит вращение;
– направлением самого вращения;
– величиной угловой скорости вращения.
Этими же элементами характеризуется и вращение гироскопа.
Собственное вращение ротора происходит вокруг его оси симметрии – главной оси гироскопа с определенной угловой скоростью. Угловой скоростью вращающегося ротора (Ω)называется величина, учитывающая скорость изменения угла поворота ротора (У). Аналитическая запись этого определения имеет вид:
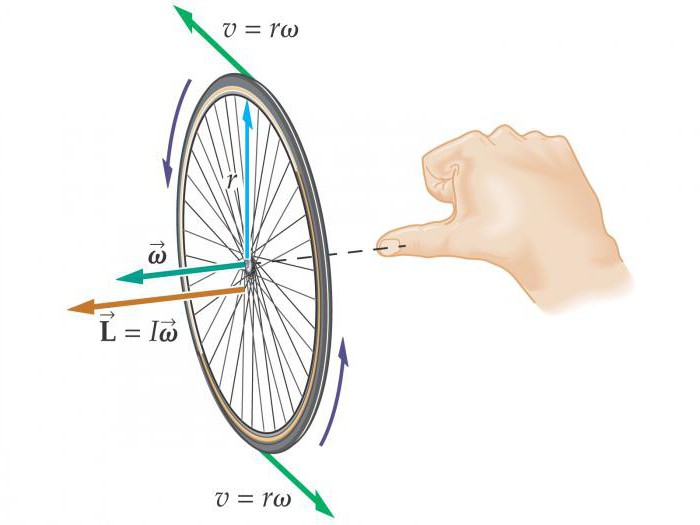
Условно все элементы собственного вращения ротора гироскопа изображаются вектором угловой скорости Ω,. Вектор Ω. направлен по оси, вокруг которой происходит вращение и в ту сторону, откуда вращение наблюдается против движения часовой стрелки (рис.4). Величина вектора изображает в определенном масштабе величину угловой скорости вращения.
Угловая скорость вращения определяется числом радиан в секунду или в технике числом оборотов в минуту.
Соотношение числа оборотов в минуту и числа радиан в секунду определяется выражением:
Ω =π·n/30 (рад/сек) (2)
n = 30·Ω/π (об/мин) (3)
где n – число оборотов в минуту.
Ротор гироскопа с тремя степенями свободы имеет возможность вращаться не только вокруг главной оси Х, но и вместе с ней вокруг оси Уили Z. Если вращающийся гироскоп поворачивается вокруг оси У или Z, то вектор результирующей угловой скорости можно представить в виде двух составляющих: вектора угловой скорости вращения главной оси гироскопа вокруг оси У или Z и вектора угловой скорости собственного вращения ротора Ω. Угловая скорость вращения ротора
Рис.4 может достигать 10000 – 30000 об/мин, и во много раз больше скорости вращения гироскопа вокруг оси У или Z . Пренебрегая по малости угловой скоростью вращения гироскопа вокруг осей У и Z, результирующую угловую скорость вращения можно считать равной Ωи направленной по главной оси Х гироскопа.
Вращательное движение и угловая скорость твердого тела
В этой статье речь пойдет о физических величинах, которые характеризуют вращательное движение тела: угловая скорость, угловое перемещение, угловое ускорение, момент сил.
Твердым телом называют совокупность жестко связанных материальных точек. Когда твердое тело производит вращение относительно какой-либо оси, отдельные материальные точки, из которых оно складывается, двигаются по окружностям разных радиусов.
За определенный промежуток времени, например, за которое тело совершит один оборот, отдельные материальные точки, из которых состоит твердое тело, пройдут разные пути, следовательно, отдельные точки будут иметь разные линейные скорости. Описывать вращение твердого тела с помощью линейных скоростей отдельных материальных точек – сложно.
Угловое перемещение
Однако, анализируя движение отдельных материальных точек, можно установить, что за одинаковый промежуток времени все они поворачиваются вокруг оси на одинаковый угол. То есть для описания вращения твердого тела удобно пользоваться такой физической величиной, как угловое перемещение:
Угловая скорость и угловое ускорение
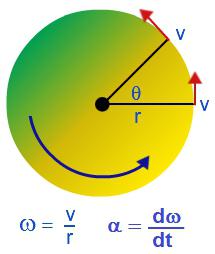
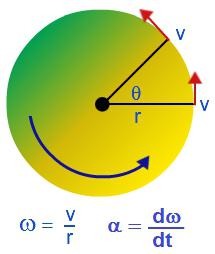
Вращательное движение можно охарактеризовать угловой скоростью: ω = ∆φ/∆t.
Угловая скорость характеризует скорость вращения тела и равняется отношению изменения угла поворота ко времени, за которое оно произошло. Измеряется в радианах за секунду: [ω] = рад/с.
Угловая скорость вращения связана с линейной скоростью следующим соотношением: v = Rω, где R – радиус окружности, по которой двигается тело.
Вращательное движение тела характеризуется еще одной физической величиной – угловым ускорением, которое равно отношению изменения угловой скорости ко времени, за которое оно произошло: ε = ∆ω/∆t. Единица измерения углового ускорения: [ε] = рад/с 2 .
Угловая скорость и угловое ускорение являются псевдовекторами, направление которых зависит от направления вращения. Его можно определить по правилу правого винта.
Равномерное вращательное движение
Равномерное вращательное движение осуществляется с постоянной угловой скоростью и описывается такими уравнениями: ε = 0, ω = const, φ = φ + ωt, где φ – начальное значение угла поворота.
Равноускоренное вращательное движение
Равноускоренное вращательное движение происходит с постоянным угловым ускорением и описывается такими уравнениями: ε = const, ω = ω + εt, φ = φ + ω t + εt 2 /2.
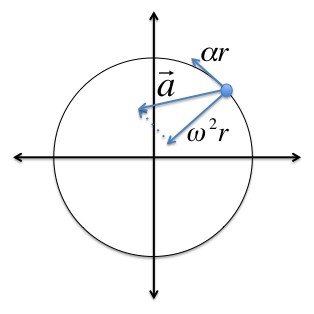
Во время вращения твердого тела центростремительное ускорение каждой точки этого тела можно найти так: ɑц = v 2 /R = (ωR) 2 /R = ω 2 R.
Когда вращение твердого тела ускоренное, можно найти тангенциальное ускорение его точек по формуле: ɑt = ∆v/∆t= ∆(ωR)/∆t= R(∆ω/∆t) = Rε.
Момент сил
Если, рассматривая физическую проблему, мы имеем дело не с материальной точкой, а с твердым телом, то действие нескольких сил на него, приложенных к различным точкам этого тела, нельзя свести к действию одной силы. В этом случае рассматривают момент сил.
Моментом силы называют произведение силы на плечо. Это векторная величина, и ее находят по формуле: M = RFsinα, где α – угол между векторами R и F. Если на тело действует несколько моментов сил, то их действие можно заменить их равнодействующей, векторной суммой этих моментов: M = M1 + M2 + …+ Mn.
Эксперименты и опыт показывают, что под действием момента силы угловая скорость тела меняется, то есть тело имеет угловое ускорение. Выясним, как зависит угловое ускорение материальной точки (совокупности материальных точек) от приложенного момента сил: F = mɑ, RF = Rma = R 2 mβ, β= M/mR 2 = M/I, где I = mR 2 – момент инерции материальной точки. Заметим, что момент инерции тела имеет зависимость как от массы тела, так и от расположения этой массы относительно оси вращения.
Читать еще: Стих про регулировщика запоминалка
Примеры решения задач
Задача 1. Ротор центрифуги делает 2•10 4 об/мин. После того как выключили двигатель, его вращение прекращается через 8 мин. Найдите угловое ускорение, а также число оборотов, которое совершает ротор с момента выключения двигателя до его полной остановки, считая, что движение ротора равноускоренное.
Найдем угловое ускорение, учитывая, что угловая скорость при равноускоренном движении описывается уравнением: ω(t) = ω – εt.
Отсюда, учитывая, что в конце движения скорость равна нулю, найдем: ε = ω /t = 2πn/t.
Переведя данные задачи в систему единиц СИ (n = 333 об/с; t = 480 с), получим: ε = 2π333/480 = 4,36(рад/с 2 ).
Угол поворота ротора центрифуги за время t будет: φ(t)= φ + ω t + εt 2 /2. Учитывая выражение для углового ускорения и то, что φ = 0, находим: φ(t)= ω t/2 = πnt.
Количество оборотов ротора за это время будет: N = φ(t)/2π = πnt/2π = nt = 8•10 4 (об.).
Ответ: угловое ускорение равно 4,36 рад/с 2 ; количество оборотов, сделанное ротором с момента выключения двигателя до его полной остановки, равно 8•10 4 об.
Задача 2. Диск, имеющий массу 1 кг и радиус 20 см, вращается с частотой 120 об. в минуту. Под действием тормозного устройства на край диска начала действовать сила трения 10 Н. Найдите время остановки диска, после того как на него стала действовать сила трения.
Найдем тормозной момент сил, действующий на диск: M = RF.
Найдем угловое ускорение диска: ε = M/I = FR/mR 2 = F/mR.
Найдем время, за которое диск остановится: t = ω /ε, где ω – начальная угловая скорость диска, которая равна 2πv.
Сделаем вычисления: t = 2πv/ ε = 2πvmR/F = 6,28•2•1•0,2/10 = 2,5 (с).
Ответ: время остановки равно 2,5 с.
Механические и электрические характеристики асинхронных электродвигателей
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся. Для примера рассмотрим АИР80В2У3.
Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 – 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду. Но поскольку двигатель асинхронный, то ротор вращается с отставанием на величину скольжения s.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Читать еще: Технические характеристики автомобилей фольксваген
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
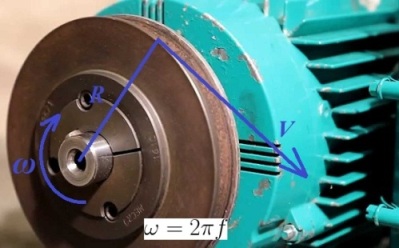
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
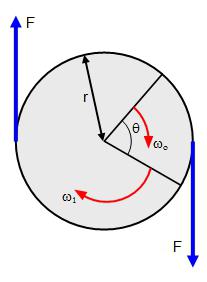
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Частота вращения: формула
Количество повторений каких-либо событий или их возникновения за одну единицу таймера называется частотой. Это физическая величина измеряется в герцах – Гц (Hz). Она обозначается буквами ν, f, F, и есть отношение количества повторяющихся событий к промежутку времени, в течение которого они произошли.
При обращении предмета вокруг своего центра можно говорить о такой физической величине, как частота вращения, формула:
где:
- N – количество оборотов вокруг оси или по окружности,
- t – время, за которое они были совершены.
В системе СИ обозначается как – с-1 (s-1) и именуется как обороты в секунду (об/с). Применяют и другие единицы вращения. При описании вращения планет вокруг Солнца говорят об оборотах в часах. Юпитер делает одно вращение в 9,92 часа, тогда как Земля и Луна оборачиваются за 24 часа.
Номинальная скорость вращения
Прежде, чем дать определение этому понятию, необходимо определиться, что такое номинальный режим работы какого-либо устройства. Это такой порядок работы устройства, при котором достигаются наибольшая эффективность и надёжность процесса на продолжении длительного времени. Исходя из этого, номинальная скорость вращения – количество оборотов в минуту при работе в номинальном режиме. Время, необходимое для одного оборота, составляет 1/v секунд. Оно называется периодом вращения T. Значит, связь между периодом обращения и частотой имеет вид:
К сведению. Частота вращения вала асинхронного двигателя – 3000 об./мин., это номинальная скорость вращения выходного хвостовика вала при номинальном режиме работы электродвигателя.
Как найти или узнать частоты вращений различных механизмов? Для этого применяется прибор, который называется тахометр.
Угловая скорость
Когда тело движется по окружности, то не все его точки движутся с одинаковой скоростью относительно оси вращения. Если взять лопасти обычного бытового вентилятора, которые вращаются вокруг вала, то точка расположенная ближе к валу имеет скорость вращения больше, чем отмеченная точка на краю лопасти. Это значит, у них разная линейная скорость вращения. В то же время угловая скорость у всех точек одинаковая.
Угловая скорость представляет собой изменение угла в единицу времени, а не расстояния. Обозначается буквой греческого алфавита – ω и имеет единицу измерения радиан в секунду (рад/с). Иными словами, угловая скорость – это вектор, привязанный к оси обращения предмета.
Формула для вычисления отношения между углом поворота и временным интервалом выглядит так:
где:
- ω – угловая скорость (рад./с);
- ∆ϕ – изменение угла отклонения при повороте (рад.);
- ∆t – время, затраченное на отклонение (с).
Обозначение угловой скорости употребляется при изучении законов вращения. Оно употребляется при описании движения всех вращающихся тел.
Угловая скорость в конкретных случаях
На практике редко работают с величинами угловой скорости. Она нужна при конструкторских разработках вращающихся механизмов: редукторов, коробок передач и прочего.
Вычислить её, применяя формулу, можно. Для этого используют связь угловой скорости и частоты вращения.
где:
- π – число, равное 3,14;
- ν – частота вращения, (об./мин.).
В качестве примера могут быть рассмотрены угловая скорость и частота вращения колёсного диска при движении мотоблока. Часто необходимо уменьшить или увеличить скорость механизма. Для этого применяют устройство в виде редуктора, при помощи которого понижают скорость вращения колёс. При максимальной скорости движения 10 км/ч колесо делает около 60 об./мин. После перевода минут в секунды это значение равно 1 об./с. После подстановки данных в формулу получится результат:
Читать еще: Шкода октавия а5 серая
ω = 2*π*ν = 2*3,14*1 = 6,28 рад./с.
К сведению. Снижение угловой скорости часто требуется для того, чтобы увеличить крутящий момент или тяговое усилие механизмов.
Как определить угловую скорость
Принцип определения угловой скорости зависит от того, как происходит движение по окружности. Если равномерно, то употребляется формула:
Если нет, то придётся высчитывать значения мгновенной или средней угловой скорости.
Величина, о которой идёт разговор, векторная, и при определении её направления используют правило Максвелла. В просторечии – правило буравчика. Вектор скорости имеет одинаковое направление с поступательным перемещением винта, имеющего правую резьбу.
Рассмотрим на примере, как определить угловую скорость, зная, что угол поворота диска радиусом 0,5 м меняется по закону ϕ = 6*t:
ω = ϕ / t = 6 * t / t = 6 с-1
Вектор ω меняется из-за поворота в пространстве оси вращения и при изменении значения модуля угловой скорости.
Угол поворота и период обращения
Рассмотрим точку А на предмете, вращающимся вокруг своей оси. При обращении за какой-то период времени она изменит своё положение на линии окружности на определённый угол. Это угол поворота. Он измеряется в радианах, потому что за единицу берётся отрезок окружности, равный радиусу. Ещё одна величина измерения угла поворота – градус.
Когда в результате поворота точка А вернётся на своё прежнее место, значит, она совершила полный оборот. Если её движение повторится n-раз, то говорят о некотором количестве оборотов. Исходя из этого, можно рассматривать 1/2, 1/4 оборота и так далее. Яркий практический пример этому – путь, который проделывает фреза при фрезеровании детали, закреплённой в центре шпинделя станка.
Внимание! Угол поворота имеет направление. Оно отрицательное, когда вращение происходит по часовой стрелке и положительное при вращении против движения стрелки.
Если тело равномерно продвигается по окружности, можно говорить о постоянной угловой скорости при перемещении, ω = const.
В этом случае находят применения такие характеристики, как:
- период обращения – T, это время, необходимое для полного оборота точки при круговом движении;
- частота обращения – ν, это полное количество оборотов, которое совершает точка по круговой траектории за единичный временной интервал.
Интересно. По известным данным, Юпитер обращается вокруг Солнца за 12 лет. Когда Земля за это время делает вокруг Солнца почти 12 оборотов. Точное значение периода обращения круглого гиганта – 11,86 земных лет.
Циклическая частота вращения (обращения)
Скалярная величина, измеряющая частоту вращательного движения, называется циклической частотой вращения. Это угловая частота, равная не самому вектору угловой скорости, а его модулю. Ещё её именуют радиальной или круговой частотой.
Циклическая частота вращения – это количество оборотов тела за 2*π секунды.
У электрических двигателей переменного тока это частота асинхронная. У них частота вращения ротора отстаёт от частоты вращения магнитного поля статора. Величина, определяющая это отставание, носит название скольжения – S. В процессе скольжения вал вращается, потому что в роторе возникает электроток. Скольжение допустимо до определённой величины, превышение которой приводит к перегреву асинхронной машины, и её обмотки могут сгореть.
Устройство этого типа двигателей отличается от устройства машин постоянного тока, где токопроводящая рамка вращается в поле постоянных магнитов. Большое количество рамок вместил в себя якорь, множество электромагнитов составили основу статора. В трёхфазных машинах переменного тока всё наоборот.
При работе асинхронного двигателя статор имеет вращающееся магнитное поле. Оно всегда зависит от параметров:
- частоты питающей сети;
- количества пар полюсов.
Скорость вращения ротора состоит в прямом соотношении со скоростью магнитного поля статора. Поле создаётся тремя обмотками, которые расположены под углом 120 градусов относительно друг друга.
Переход от угловой к линейной скорости
Существует различие между линейной скоростью точки и угловой скоростью. При сравнении величин в выражениях, описывающих правила вращения, можно увидеть общее между этими двумя понятиями. Любая точка В, принадлежащая окружности с радиусом R, совершает путь, равный 2*π*R. При этом она делает один оборот. Учитывая, что время, необходимое для этого, есть период Т, модульное значение линейной скорости точки В находится следующим действием:
ν = 2*π*R / Т = 2*π*R* ν.
Так как ω = 2*π*ν, то получается:
Следовательно, линейная скорость точки В тем больше, чем дальше от центра вращения находится точка.
К сведению. Если рассматривать в качестве такой точки города на широте Санкт-Петербурга, их линейная скорость относительно земной оси равна 233 м/с. Для объектов на экваторе – 465 м/с.
Числовое значение вектора ускорения точки В, движущейся равномерно, выражается через R и угловую скорость, таким образом:
а = ν2/ R, подставляя сюда ν = ω* R, получим: а = ν2/ R = ω2* R.
Это значит, чем больше радиус окружности, по которой движется точка В, тем больше значение её ускорения по модулю. Чем дальше расположена точка твердого тела от оси вращения, тем большее ускорение она имеет.
Поэтому можно вычислять ускорения, модули скоростей необходимых точек тел и их положений в любой момент времени.
Понимание и умение пользоваться расчётами и не путаться в определениях помогут на практике вычислениям линейной и угловой скоростей, а также свободно переходить при расчётах от одной величины к другой.